Introduction à la dérivation numérique
Structure du chapitre 5
Ce chapitre couvre la dérivation et l'intégration numériques en deux parties :
Partie A — Dérivation numérique (3 leçons)
- Formules de dérivation, instabilité, extrapolation de Richardson
Partie B — Intégration numérique (8 leçons)
- Introduction, Newton-Cotes, Simpson, Romberg, quadratures gaussiennes, splines, intégrales impropres et multiples
Objectifs d'apprentissage
À la fin de cette leçon, vous serez en mesure de :
- Expliquer pourquoi la dérivation numérique est nécessaire en pratique
- Comprendre le lien entre interpolation et dérivation numérique
- Dériver le polynôme de Newton-Gregory pour obtenir des formules de dérivation
- Évaluer l'ordre de l'erreur de troncature
Prérequis
- Polynômes d'interpolation de Newton-Gregory (Chapitre 4)
- Différences finies descendantes
- Développements de Taylor
Motivation : le problème de la fusée
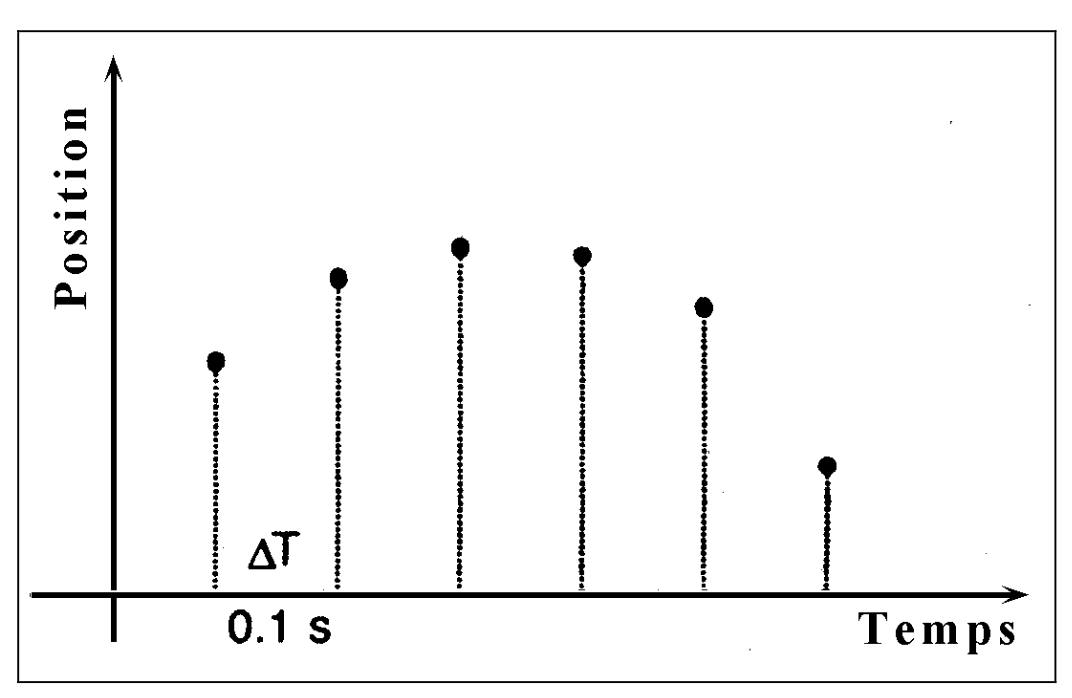
Reprenons le problème de la fusée introduit au chapitre 4. Une fusée est suivie par radar, et sa position est mesurée à intervalles réguliers. Mais les ingénieurs ont besoin de bien plus que la position :
| Grandeur | Signification physique | Calcul |
|---|---|---|
| Position | Où est la fusée ? | Mesure directe |
| Vitesse | À quelle vitesse se déplace-t-elle ? | Dérivée première |
| Accélération | Comment la vitesse change-t-elle ? | Dérivée seconde |
| Consommation | Combien de carburant a été utilisé ? | Intégrale |
Problème fondamental
Nous connaissons la fonction uniquement en des points discrets . Comment estimer ou à partir de ces données ?
Rappel : d'où viennent les données ?
Au chapitre 4, nous avons appris à interpoler des données discrètes par des polynômes. Mais avant même de parler d'interpolation, il faut se poser une question fondamentale : nos données sont-elles fiables ?
En pratique, l'acquisition de données est elle-même une source d'erreurs :
- Fréquence d'échantillonnage : si on mesure la position de la fusée toutes les 10 secondes au lieu de chaque seconde, on rate les variations rapides. Inversement, échantillonner trop vite peut introduire du bruit de mesure inutile.
- Précision des instruments : un radar a une résolution finie. Chaque mesure est entachée d'une erreur .
- Choix du modèle d'interpolation : un polynôme de degré trop élevé peut osciller (phénomène de Runge), tandis qu'un degré trop bas ne capture pas la forme réelle de .
Ces problèmes — que nous avons étudiés aux chapitres 3 et 4 — sont des réalités incontournables en ingénierie.
Hypothèse pour ce chapitre
Dans tout ce chapitre, nous supposerons que les données sont fiables : les valeurs sont connues avec une précision suffisante, et le pas est adapté au problème. Nous nous concentrons sur les erreurs introduites par les méthodes numériques elles-mêmes (troncature, arrondi), pas par l'acquisition des données.
En pratique, il faut toujours vérifier cette hypothèse avant d'appliquer les formules de ce chapitre !
Principe général : dériver l'interpolant
L'idée centrale est simple : si nous ne connaissons pas explicitement, nous pouvons la remplacer par son polynôme d'interpolation , puis dériver ce polynôme.
Décomposition fondamentale
Rappelons que l'interpolation de par un polynôme s'écrit :
où est l'erreur d'interpolation (ou erreur de troncature).
En dérivant cette relation :
Stratégie de dérivation numérique
- Construire le polynôme d'interpolation passant par les points de données
- Calculer analytiquement
- Utiliser comme approximation de
- Estimer l'erreur
De même pour les dérivées d'ordre supérieur :
Et pour l'intégration :
Dérivation du polynôme de Newton-Gregory
Nous utilisons le polynôme de Newton-Gregory avec différences descendantes, qui est particulièrement adapté aux données équidistantes.
Rappel : forme du polynôme
Pour des points équidistants , le polynôme de Newton-Gregory s'écrit :
où est la variable réduite et sont les différences finies descendantes.
Développement explicite
Calcul de la dérivée
Pour dériver par rapport à , nous utilisons la règle de chaîne :
car .
Calculons terme par terme :
Formule générale de la dérivée
En combinant, on obtient la dérivée du polynôme de Newton-Gregory en un point quelconque :
C'est une formule en : elle donne la dérivée en n'importe quel point, pourvu qu'on connaisse la valeur de .
Que représente s ?
Le paramètre mesure la position relative par rapport au premier point , exprimée en nombre de pas :
- → on est en (premier point)
- → on est en (deuxième point)
- → on est en (troisième point)
- → on est entre et
- → on est un pas avant
Pourquoi évaluer en ?
La formule générale ci-dessus est valide pour tout , mais en pratique on choisit presque toujours (c'est-à-dire ). Pourquoi ?
1. Simplification algébrique massive. Quand , tous les termes en et disparaissent :
- Le coefficient de devient
- Le coefficient de devient
- On obtient des coefficients constants :
2. est mobile. Le point n'est pas figé ! C'est simplement le premier point de notre table de différences. Si on veut la dérivée en , on reconstruit la table en prenant comme nouveau point de départ , et on applique la même formule avec .
3. Précision maximale. L'erreur d'interpolation est minimale près de (le centre de la table), donc la dérivée y est la plus fiable.
En résumé
On ne se limite pas à un seul point ! On peut calculer la dérivée partout en déplaçant . Mais la formule en est la plus simple et la plus utilisée.
Formule en (cas )
En posant dans la formule générale :
Formule de dérivation de Newton-Gregory
Les coefficients alternent en signe et décroissent : — c'est la série harmonique alternée !
Cas particuliers utiles : autres valeurs de
Bien que soit le cas le plus courant, il est instructif de voir ce qui se passe pour d'autres valeurs.
Cas (dérivée en ) : avec 2 points ()
C'est la même différence avant ! Avec 3 points () :
On retrouve la différence centrée ! C'est logique : est au milieu de et .
Cas (dérivée en ) : avec 2 points, en remplaçant :
Ce n'est qu'une extrapolation — peu fiable car on sort de l'intervalle des données. En pratique, on préférerait relabeler les points pour rester en .
Lien avec les formules classiques
Les formules de différence avant, différence arrière et différence centrée que nous verrons en détail dans la leçon suivante ne sont que des cas particuliers de la formule générale de Newton-Gregory, évaluée en différents et avec différents nombres de points .
Analyse de l'erreur
Forme de l'erreur de troncature
Rappel : l'erreur d'interpolation de Newton-Gregory de degré est :
où et est un point dans l'intervalle contenant les données.
En notation compacte, le numérateur est le symbole de Pochhammer descendant :
Dérivation : pour obtenir l'erreur sur la dérivée, on dérive par rapport à . Par la règle de chaîne :
Il faut dériver le produit par rapport à . Ce produit comporte facteurs linéaires. Par la règle du produit généralisée, sa dérivée est la somme de termes, où chaque terme omet un facteur :
Évaluation en : quand , chaque produit contient le facteur sauf lorsque (car c'est le terme qui est omis). Donc le seul terme survivant est celui pour :
On injecte dans l'expression de :
Erreur de troncature de la dérivation
L'erreur est en : elle décroît comme la puissance -ième du pas.
Ordre de l'erreur
L'erreur de dérivation est en , c'est-à-dire qu'elle décroît comme quand le pas diminue.
- Avec 2 points () : erreur en
- Avec 3 points () : erreur en
- Avec 4 points () : erreur en
Interprétation
Plus on utilise de points pour l'interpolation :
- Plus le polynôme est fidèle à
- Plus la dérivée est proche de
- Plus l'erreur décroît rapidement avec
Mais attention : augmenter indéfiniment n'est pas toujours bénéfique (phénomène de Runge, instabilité numérique).
Résumé
Dans cette leçon, nous avons établi le principe fondamental de la dérivation numérique :
- La dérivation numérique consiste à dériver le polynôme d'interpolation plutôt que la fonction inconnue
- Le polynôme de Newton-Gregory donne une formule générale en , valide en tout point
- En (au point ), la formule se simplifie avec des coefficients harmoniques alternés
- Le point est mobile : on peut le déplacer pour calculer la dérivée partout
- Les formules classiques (différences avant, centrée, arrière) sont des cas particuliers
- L'erreur de troncature est en pour un polynôme de degré
Pour aller plus loin
Dans la leçon suivante, nous étudierons les formules de dérivation concrètes (différences avant, arrière, centrées) et analyserons un problème fondamental : l'instabilité de la dérivation numérique face aux erreurs d'arrondi.
Annexe A — Approche alternative par Taylor
L'annexe A présente une autre façon d'obtenir les mêmes formules : au lieu de dériver le polynôme de Newton-Gregory, on manipule directement les développements de Taylor de et . Cette approche révèle un élégant principe de dualité entre soustraction (dérivées impaires) et addition (dérivées paires), et donne directement les termes d'erreur exacts. Nous vous recommandons de la lire après la leçon sur les formules et l'instabilité.